03: Hand tools and fabrication
This week I built a Maui kinetic sculpture with a motor and power source, soldered pins onto my microcontroller, and documented the build.
In post semester hindsight, this was easily the week I spent the most amount of time on the course. Taught me a lesson in simplified design, and empahsized the importance of thinking throughthe physical operation of my design
Concept
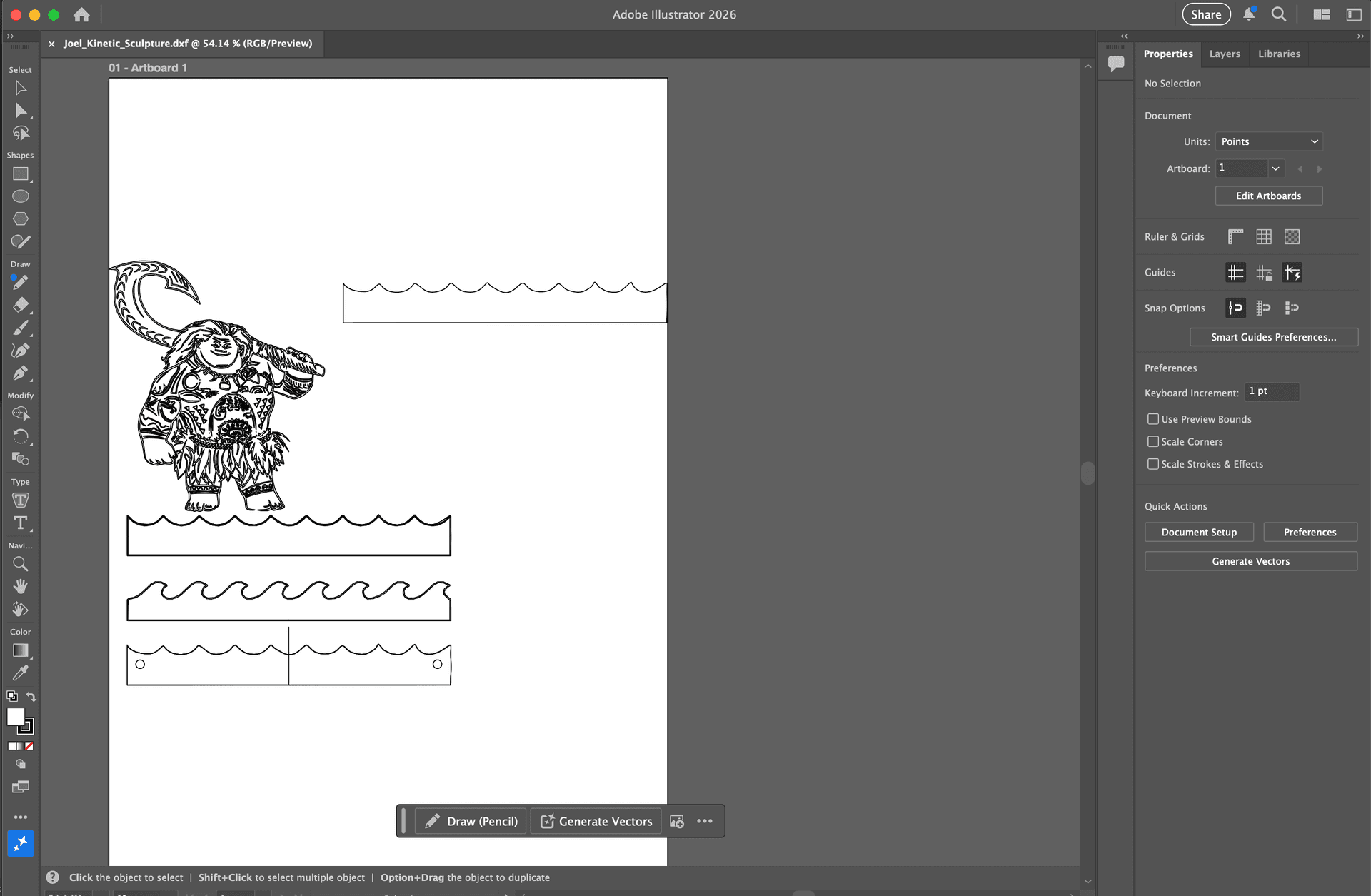
The sculpture is a picture of Maui, that I wanted to bob up and down. I used inkscape
Mechanical build
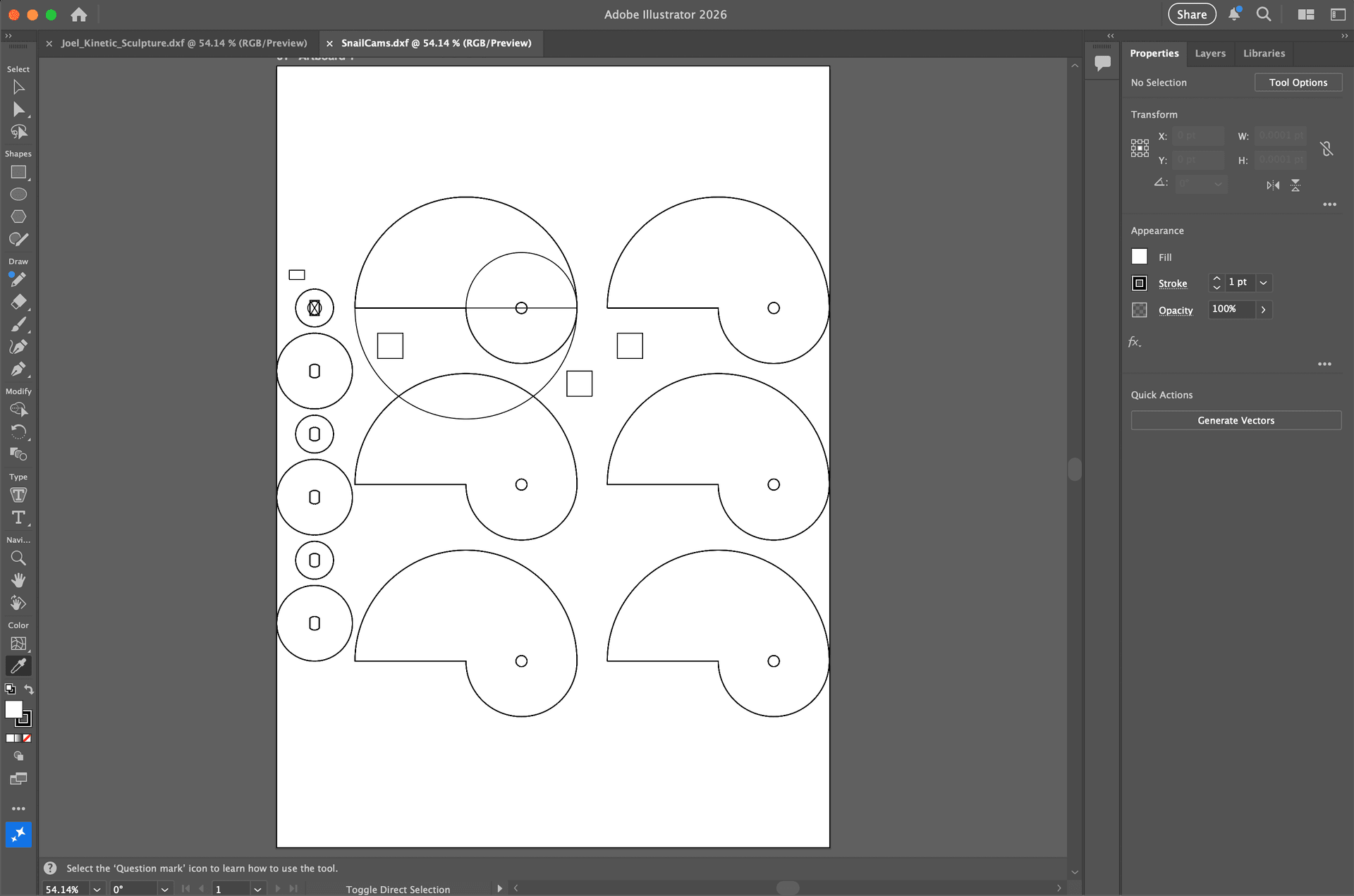
I made this part using wood. I imported images into Fusion360 and then exported DXF files and laser cut them using Wood. I made the Maui cutout using an image I found online and traced it using lines in Fusion360 (painful endeavour) I made the snail cam dxfs and the gears using tools in fusion360 as well. I used semi circles to make the snail cams and I used the gear tool in fusion to make the gears (press s and type 'gear')
Here is an image of my snail cams
Soldering
Soldered my pins onto the microcontroller. To keep it straight, you plug the microcontroller into a breadboard first

Code
My sketch used one control parameter for motor speed via PWM — a getSpeed() function returns a value from 0–255, and analogWrite drives the motor pin.
const int MOTOR_PIN = 9;
int getSpeed() {
// Map a control input (e.g. pot or fixed level) to PWM range 0–255
int raw = analogRead(A0);
return map(raw, 0, 1023, 0, 255);
}
void setup() {
pinMode(MOTOR_PIN, OUTPUT);
}
void loop() {
int speed = getSpeed();
analogWrite(MOTOR_PIN, speed); // PWM: pulse width sets average motor voltage
delay(20);
}Working Demo (ish)
The video shows my working snail cams and the gears of the device. The gears got destroyed as the semester wore out but I've included all the designs and here is a video of the snail cam motion
Automata inspiration
This is the mechanism I integrated into my kinematic design that I wanted to go for
Issues & next time
I need to make things smaller at first and then scale up. I'm not a mechanical engineer, so a lot of the analysis will need to be experiential, get a sense of the bottlenecks and what breaks